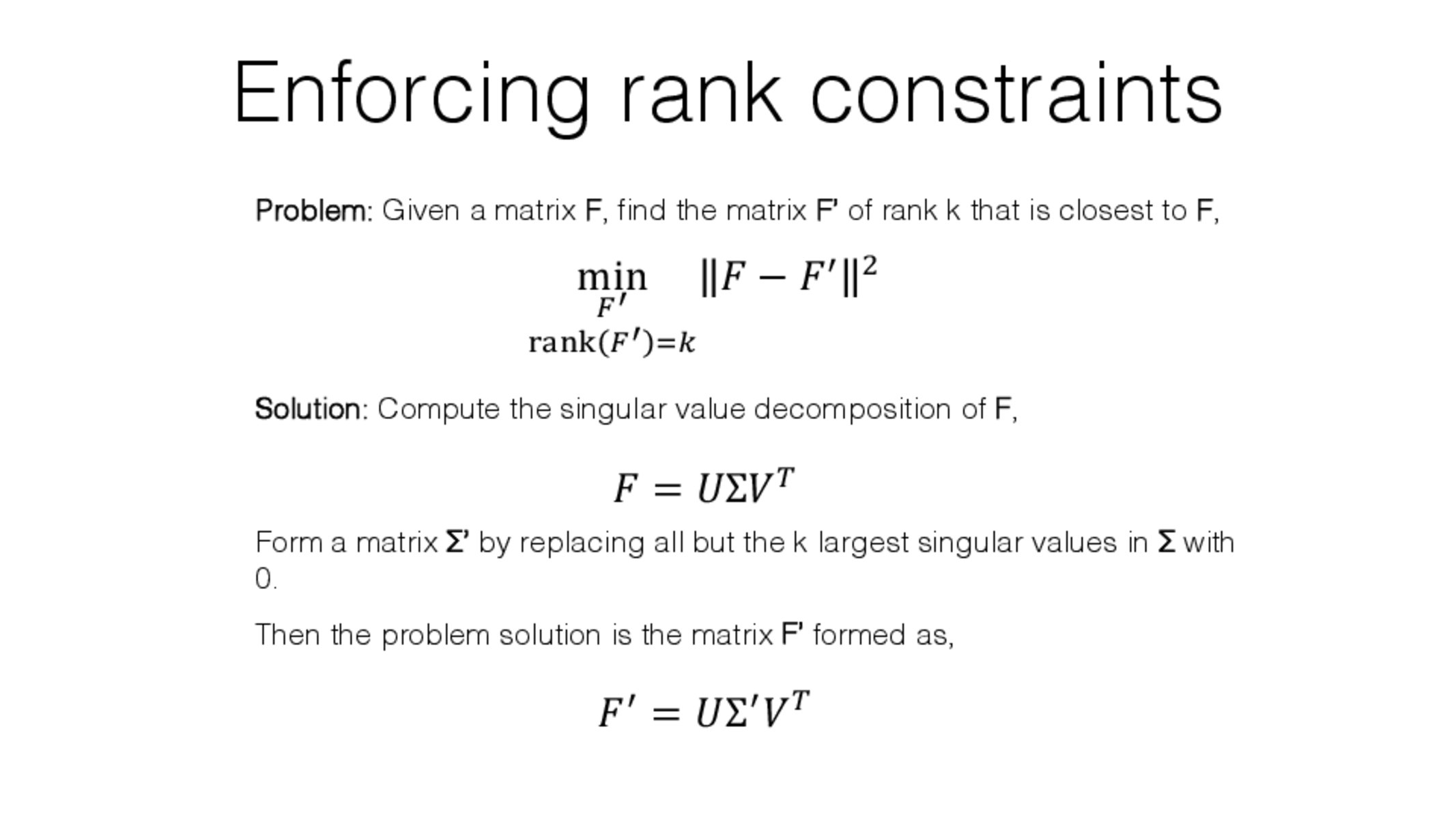
why is it so important to enforce the rank 2 constraint? i.e. why does it matter if our estimated matrix F is rank 3?
Update after hearing post-lecture Q&A:
Is it because then the epipoles will always be (0,0,0)? But then would this be "possible" in, say, a degenerate case with parallel cameras?
mpotoole
To recap: An epipole is the projection of the camera origin on the corresponding image plane. Now, assuming the non-degenerate case where the two camera origins are different, the epipoles will be given by $e \neq 0$. And because both $Fe=0$ and $e \neq 0$, $F$ cannot be full rank.
This post might help provide another perspective on the rank of matrix $F$ too.
So why enforce the rank of the matrix? Well, a fundamental/essential matrix of rank 3 simply does not make any geometric sense. So enforcing the rank 2 constraint makes sure that we have a valid fundamental/essential matrix to work with.
(Btw, in the case of parallel cameras, the rank of the matrix is still 2.)
why is it so important to enforce the rank 2 constraint? i.e. why does it matter if our estimated matrix F is rank 3?
Update after hearing post-lecture Q&A: Is it because then the epipoles will always be (0,0,0)? But then would this be "possible" in, say, a degenerate case with parallel cameras?
To recap: An epipole is the projection of the camera origin on the corresponding image plane. Now, assuming the non-degenerate case where the two camera origins are different, the epipoles will be given by $e \neq 0$. And because both $Fe=0$ and $e \neq 0$, $F$ cannot be full rank.
This post might help provide another perspective on the rank of matrix $F$ too.
So why enforce the rank of the matrix? Well, a fundamental/essential matrix of rank 3 simply does not make any geometric sense. So enforcing the rank 2 constraint makes sure that we have a valid fundamental/essential matrix to work with.
(Btw, in the case of parallel cameras, the rank of the matrix is still 2.)