To find the camera center, do we take the eigenvector v in V in U?V^T that corresponds to an eigenvalue of 0, and that vector by itself is the coordinates of the camera center?
motoole2
Sounds correct to me! Let me add some details.
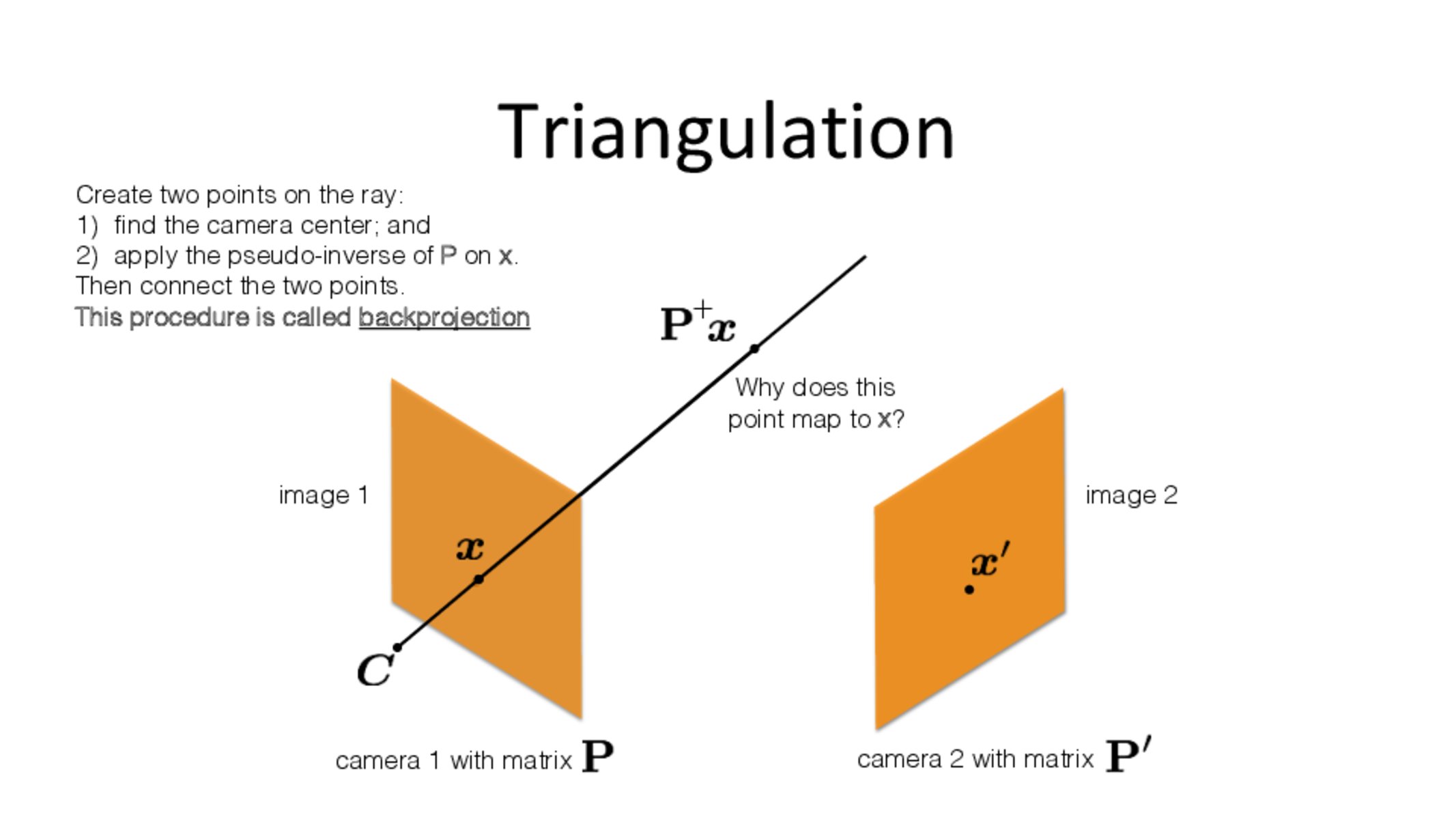
The camera center (in world coordinates) is a homogeneous 3D coordinate $\mathbf{c}$ that satisfies the equation $\mathbf{0} = \mathbf{P}\mathbf{c}$. That is, it's the only point in 3D space whose projection onto the image plane is undefined.
As a result, there are a couple of ways to solve for the camera center $\mathbf{c}$. As you stated, one approach is to compute the smallest eigenvector of a 4x4 matrix $\mathbf{P}^T \mathbf{P}$. Or compute the SVD $\mathbf{P} = \mathbf{U}\Sigma \mathbf{V}^T$, and grab the smallest singular vector of $\mathbf{V}$.
To find the camera center, do we take the eigenvector v in V in U?V^T that corresponds to an eigenvalue of 0, and that vector by itself is the coordinates of the camera center?
Sounds correct to me! Let me add some details.
The camera center (in world coordinates) is a homogeneous 3D coordinate $\mathbf{c}$ that satisfies the equation $\mathbf{0} = \mathbf{P}\mathbf{c}$. That is, it's the only point in 3D space whose projection onto the image plane is undefined.
As a result, there are a couple of ways to solve for the camera center $\mathbf{c}$. As you stated, one approach is to compute the smallest eigenvector of a 4x4 matrix $\mathbf{P}^T \mathbf{P}$. Or compute the SVD $\mathbf{P} = \mathbf{U}\Sigma \mathbf{V}^T$, and grab the smallest singular vector of $\mathbf{V}$.