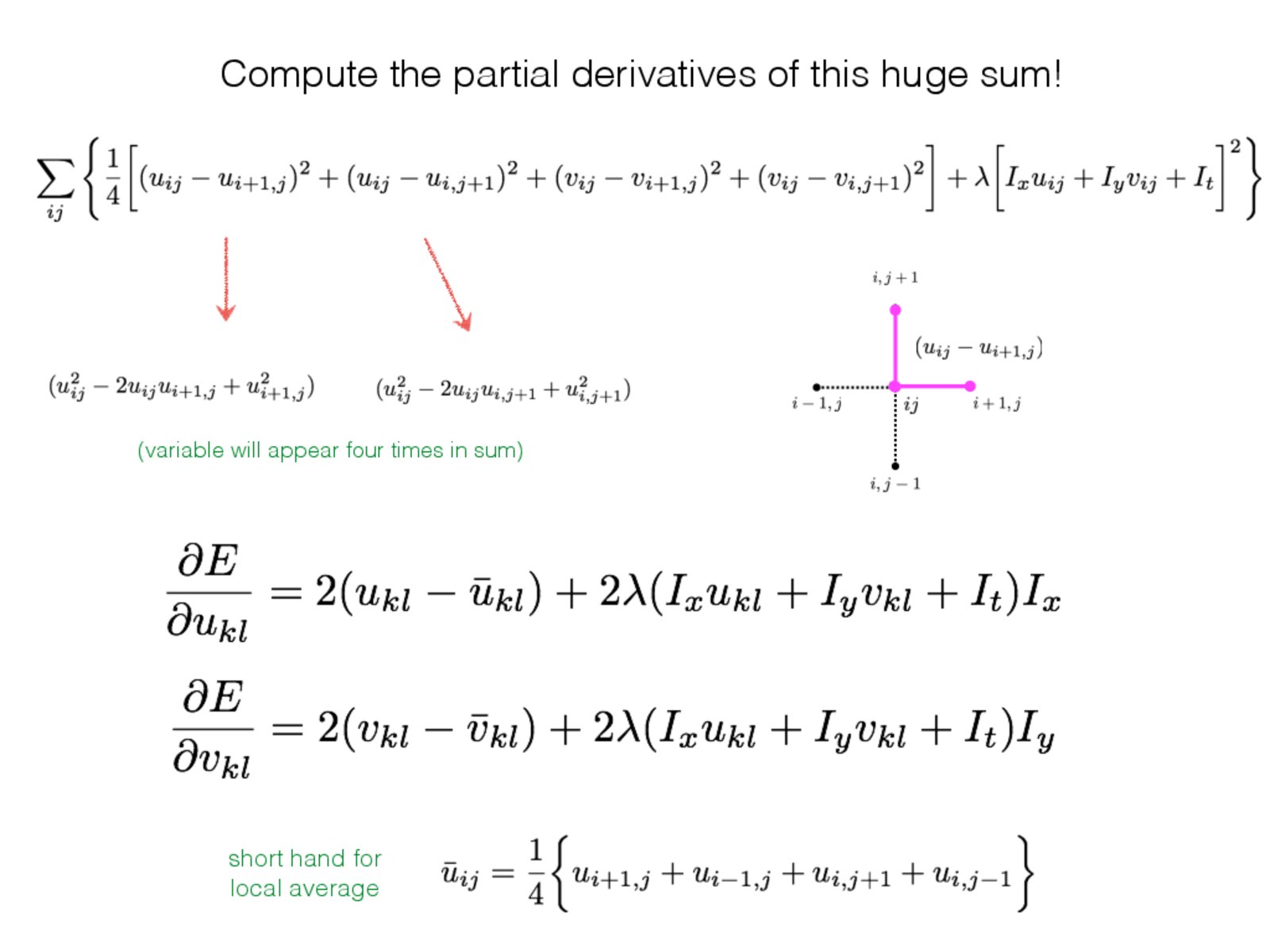
I'm a bit confused here... In previous slides when defining the loss function $E$, we only use $u_{i + 1, j} - u_{i,j}$, $u_{i, j + 1} - u_{i, j}$ and other two similar difference for $v$ to express the smoothness constraint.
If that's the case, why will the term $u_{i - 1, j}$, $u_{i, j - 1}$, etc. exists in the partial derivative form?
motoole2
As stated in lecture, the term $u_{kl}$ appears five times in the loss function E: four times for the smoothness term and once for the brightness constancy term. More specifically, when iterating over indices $i$ and $j$, the term $u_{kl}$ will appear three times when $i = k$ and $j = l$, once when $i = k-1$ and $j = l$, and once more when $i = k$ and $j = l-1$.
I'm a bit confused here... In previous slides when defining the loss function $E$, we only use $u_{i + 1, j} - u_{i,j}$, $u_{i, j + 1} - u_{i, j}$ and other two similar difference for $v$ to express the smoothness constraint.
If that's the case, why will the term $u_{i - 1, j}$, $u_{i, j - 1}$, etc. exists in the partial derivative form?
As stated in lecture, the term $u_{kl}$ appears five times in the loss function E: four times for the smoothness term and once for the brightness constancy term. More specifically, when iterating over indices $i$ and $j$, the term $u_{kl}$ will appear three times when $i = k$ and $j = l$, once when $i = k-1$ and $j = l$, and once more when $i = k$ and $j = l-1$.