$W$ is a constant 3x3 matrix (as defined in the slide) and results in $UW\Sigma U^T$ being a skew symmetric matrix. We can also verify that, when combining either rotation matrix $R$ and $[t]_x$, we get our essential matrix E given this definition of $W$.
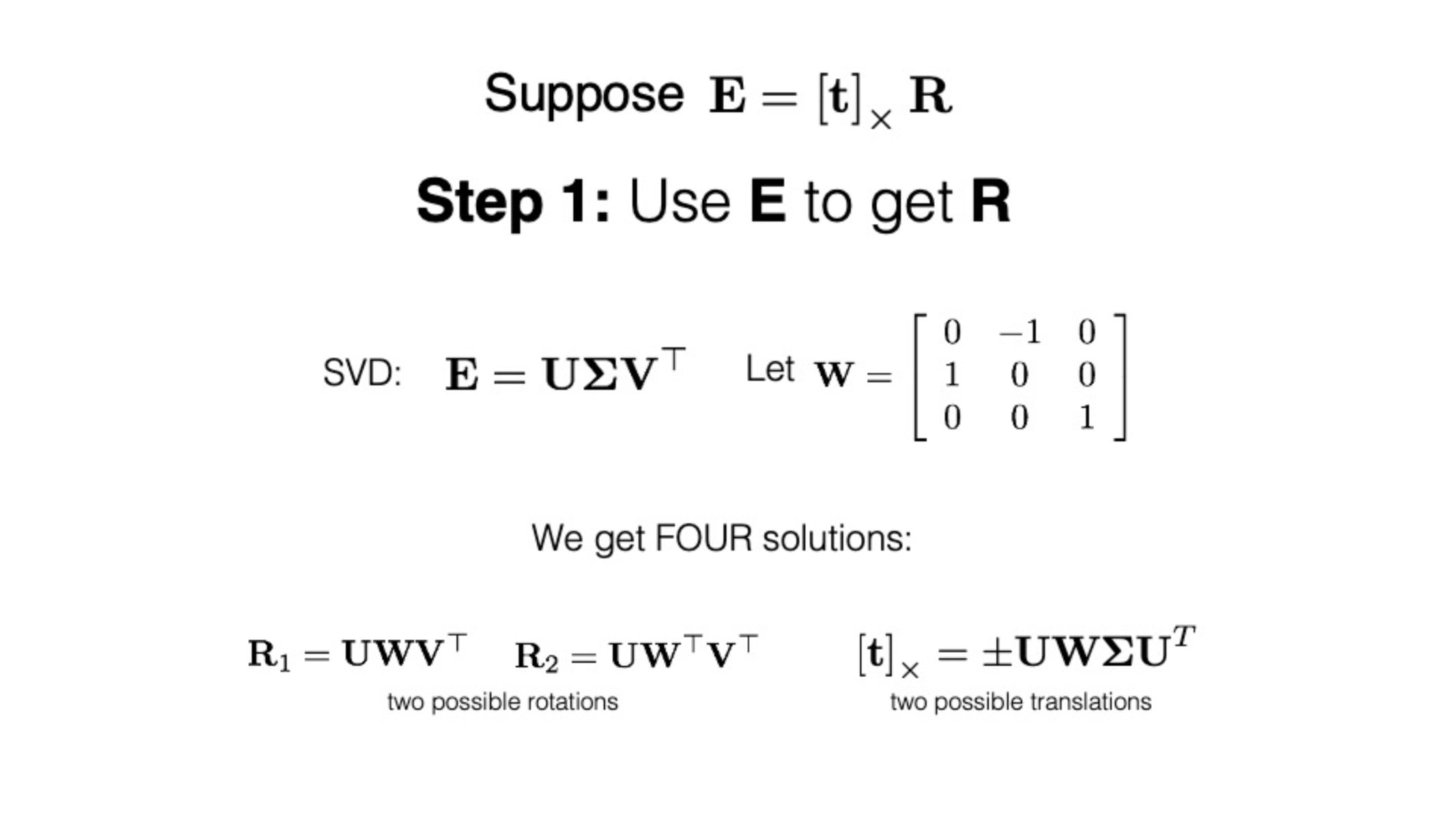
Where do the values in W come from?
$W$ is a constant 3x3 matrix (as defined in the slide) and results in $UW\Sigma U^T$ being a skew symmetric matrix. We can also verify that, when combining either rotation matrix $R$ and $[t]_x$, we get our essential matrix E given this definition of $W$.