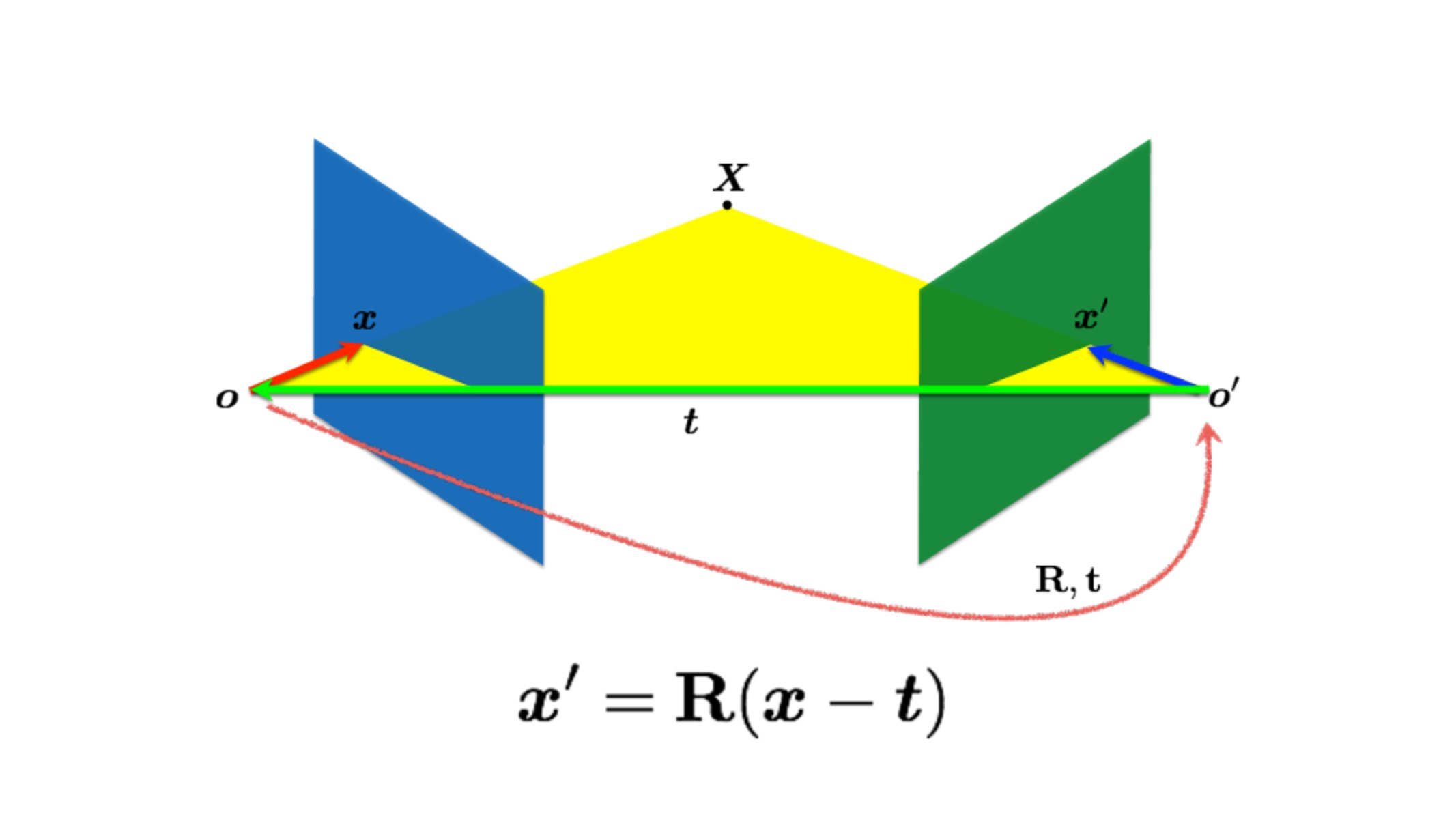
This expression describes the transformation from one camera coordinate system to another. The points $x$ and $x'$ represent the 3D location of $X$ with respect to these two different coordinate systems. And to go from one to another, we must perform two operations: a rotation and a translation.
Here, the vector $t$ represents the location of camera center $o'$ with respect to the left camera coordinate system. After subtraction, we need to rotate the coordinate systems by $R$ such that they align. This procedure is described in this slide.
How did we get x' = R(x-t)?
This expression describes the transformation from one camera coordinate system to another. The points $x$ and $x'$ represent the 3D location of $X$ with respect to these two different coordinate systems. And to go from one to another, we must perform two operations: a rotation and a translation.
Here, the vector $t$ represents the location of camera center $o'$ with respect to the left camera coordinate system. After subtraction, we need to rotate the coordinate systems by $R$ such that they align. This procedure is described in this slide.