I was a little confused in lecture on why we would want the rank 2 approximation for F. Can someone please explain?
motoole2
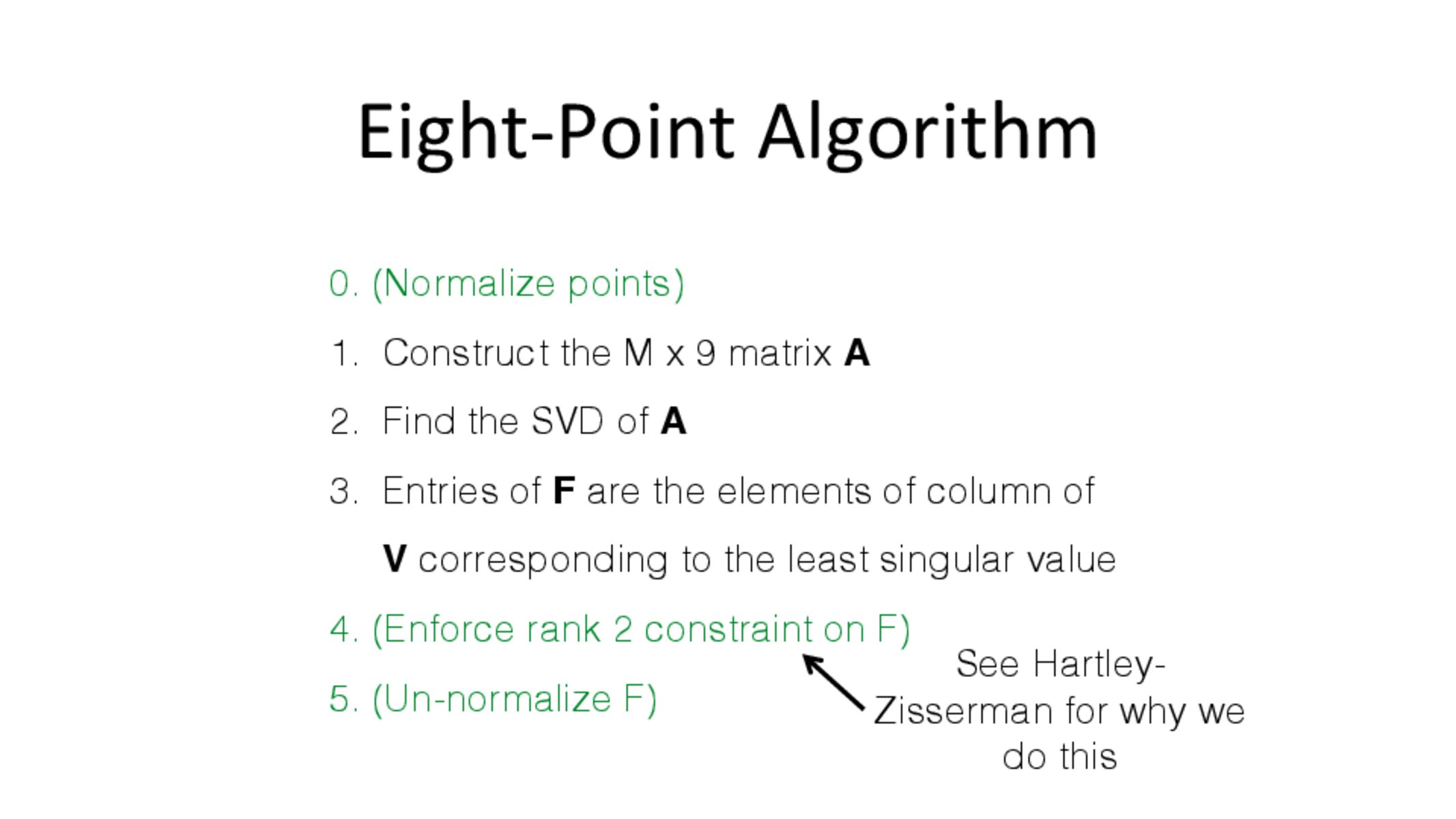
Rank 2 is a property of the essential matrix $\mathbf{E}$ and fundamental matrix $\mathbf{F}$. Let's focus on the essential matrix however.
In this slide, we show that the essential matrix can be written as a product of two matrices:
$\mathbf{E} = \mathbf{R}[\mathbf{t}]_x$
Note here that the 3x3 skew symmetric matrix $[\mathbf{t}]_x$ (as defined on this slide) is rank 2! That is, any row is given as a linear combination of the other two rows. The result of multiplying the rank 3 matrix $\mathbf{R}$ and a rank 2 matrix $[\mathbf{t}]_x$ is a rank 2 matrix $\mathbf{E}$.
However, step 3 of the algorithm shown on this slide is not guaranteed to produce a rank 2 matrix. So this constraint should be enforced in practice.
I was a little confused in lecture on why we would want the rank 2 approximation for F. Can someone please explain?
Rank 2 is a property of the essential matrix $\mathbf{E}$ and fundamental matrix $\mathbf{F}$. Let's focus on the essential matrix however.
In this slide, we show that the essential matrix can be written as a product of two matrices:
$\mathbf{E} = \mathbf{R}[\mathbf{t}]_x$
Note here that the 3x3 skew symmetric matrix $[\mathbf{t}]_x$ (as defined on this slide) is rank 2! That is, any row is given as a linear combination of the other two rows. The result of multiplying the rank 3 matrix $\mathbf{R}$ and a rank 2 matrix $[\mathbf{t}]_x$ is a rank 2 matrix $\mathbf{E}$.
However, step 3 of the algorithm shown on this slide is not guaranteed to produce a rank 2 matrix. So this constraint should be enforced in practice.
That makes sense, thanks!