Could you please reexplain how this may present some problems or trickiness moving forward? I remember it being mentioned in lecture, but upon reviewing the slides I have forgotten.
motoole2
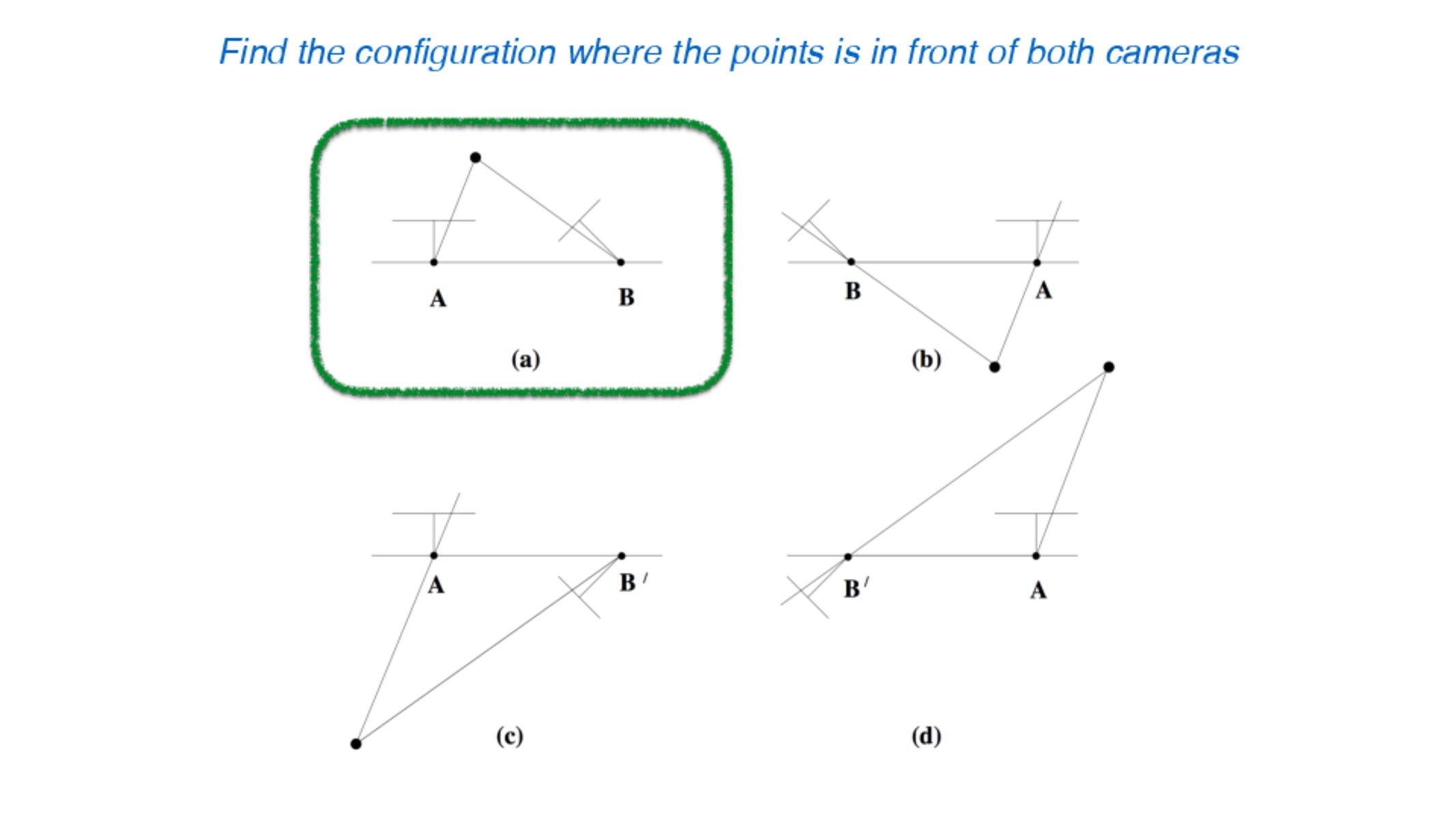
As explained in the slides that proceed this one, there are four possible solutions that involve a combination of (i) one of rotation matrices $\mathbf{R}_1$ or $\mathbf{R}_2$ and (ii) a translation vector $\pm \mathbf{t}$. (Note that, if the determinant of the rotation matrix is somehow -1, then the matrix needs to be negated.)
Now, to determine which of the four possible solutions is correct, one would triangulate points in all four cases. As depicted in this slide, the correct configuration will produce points in front of both cameras (it is not sufficient to check that points are in front of one camera only).
Could you please reexplain how this may present some problems or trickiness moving forward? I remember it being mentioned in lecture, but upon reviewing the slides I have forgotten.
As explained in the slides that proceed this one, there are four possible solutions that involve a combination of (i) one of rotation matrices $\mathbf{R}_1$ or $\mathbf{R}_2$ and (ii) a translation vector $\pm \mathbf{t}$. (Note that, if the determinant of the rotation matrix is somehow -1, then the matrix needs to be negated.)
Now, to determine which of the four possible solutions is correct, one would triangulate points in all four cases. As depicted in this slide, the correct configuration will produce points in front of both cameras (it is not sufficient to check that points are in front of one camera only).