How does the [R] matrix work? Is it a tensor? If not, since the dimensions do not match, how can multiplication occur properly?
mpotoole
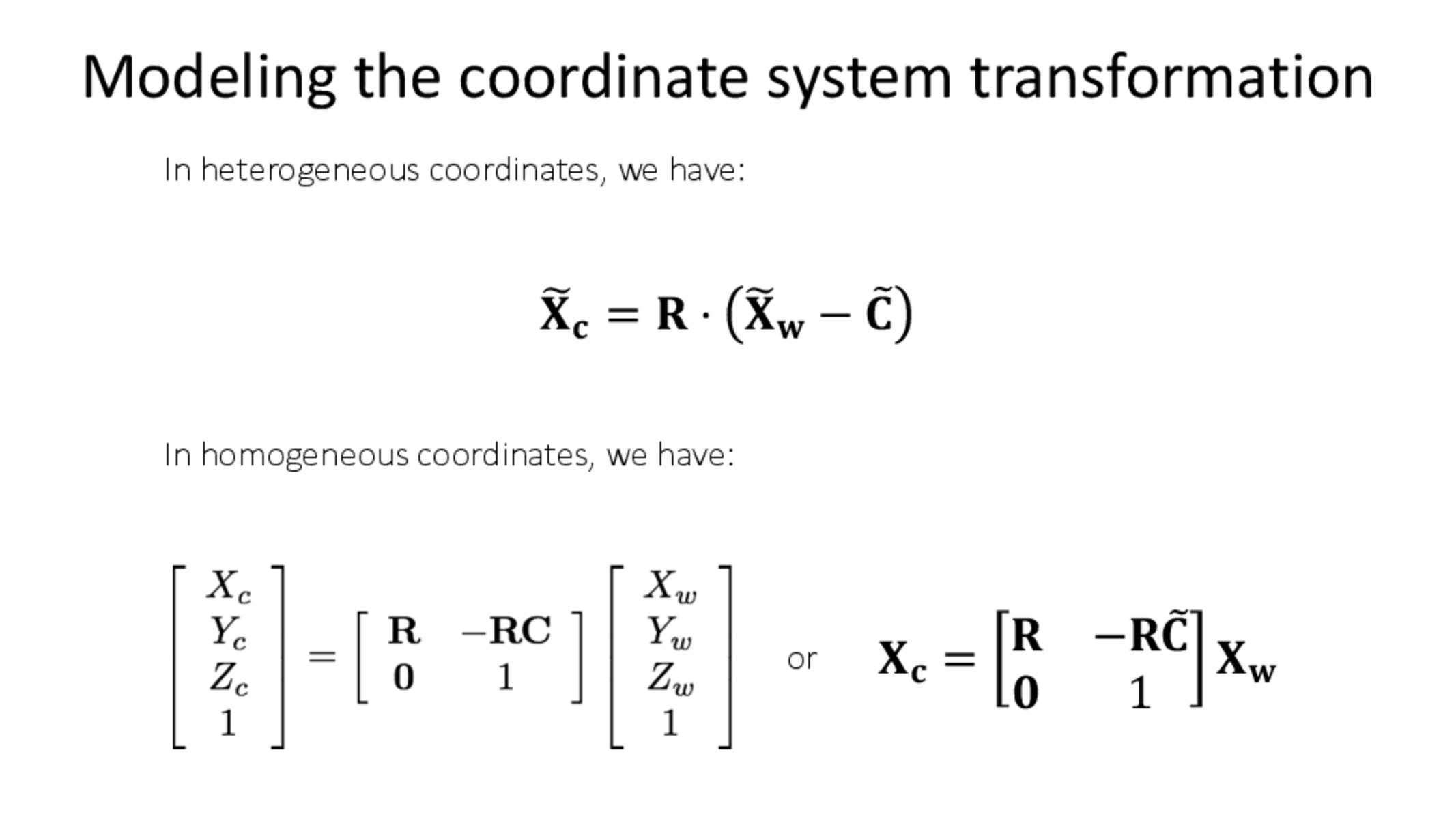
@arvinwu168 In this slide, $R$ is a 3 x 3 rotation matrix. Note that the symbol $\tilde{C}$ (with the tilde) represents heterogeneous coordinates, and $C$ (without the tilde) represents homogeneous coordinates.
The top equation represents a translation, followed by a rotation operation applied to a heterogeneous coordinate $\tilde{X}_w$ (a 3 x 1 vector representing a point in 3D world space). The output is another 3 x 1 vector, representing the same point with respect to the camera coordinate system.
The bottom right equation is the same operation, but homogenized. The homogeneous vector $X_w$ is now a 4 x 1 vector, and the matrix $[R~~-R\tilde{C};~~0~~1]$ is a 4 x 4 matrix. This matrix is constructed by concatenating the following together: $R$ (3 x 3 matrix), $-R\tilde{C}$ (3 x 1 vector), a vector of zeros (1 x 3 vector), and the scalar 1.
(I will note that there is a missing tilde over the C in the bottom left equation though.)
How does the [R] matrix work? Is it a tensor? If not, since the dimensions do not match, how can multiplication occur properly?
@arvinwu168 In this slide, $R$ is a 3 x 3 rotation matrix. Note that the symbol $\tilde{C}$ (with the tilde) represents heterogeneous coordinates, and $C$ (without the tilde) represents homogeneous coordinates.
The top equation represents a translation, followed by a rotation operation applied to a heterogeneous coordinate $\tilde{X}_w$ (a 3 x 1 vector representing a point in 3D world space). The output is another 3 x 1 vector, representing the same point with respect to the camera coordinate system.
The bottom right equation is the same operation, but homogenized. The homogeneous vector $X_w$ is now a 4 x 1 vector, and the matrix $[R~~-R\tilde{C};~~0~~1]$ is a 4 x 4 matrix. This matrix is constructed by concatenating the following together: $R$ (3 x 3 matrix), $-R\tilde{C}$ (3 x 1 vector), a vector of zeros (1 x 3 vector), and the scalar 1.
(I will note that there is a missing tilde over the C in the bottom left equation though.)