
Here's my justification.
So recall from this slide that the epipole is a point that lies on every epipolar plane (or epipolar line)! As a result, all point $x'$ on the corresponding camera, there exists an epipolar plane that contains that point $x'$ and the epipole $e$. In other words, $x'^T E e = 0$ for all $x'$. And this can only be true if $E e = \mathbf{0}$.
Yet another way to prove that this is the case is to use the definition for the essential matrix here, and make use of the fact that the epipole and the baseline (translation vector) are collinear!

Is it because the line according to l' = Ex becomes a point when x = e? But how does a point make a line equation 0?
why does (e'^T) E = 0 ? Is there a proof for this? Thanks!
@arvinwu168 In this slide, $R$ is a 3 x 3 rotation matrix. Note that the symbol $\tilde{C}$ (with the tilde) represents heterogeneous coordinates, and $C$ (without the tilde) represents homogeneous coordinates.
The top equation represents a translation, followed by a rotation operation applied to a heterogeneous coordinate $\tilde{X}_w$ (a 3 x 1 vector representing a point in 3D world space). The output is another 3 x 1 vector, representing the same point with respect to the camera coordinate system.
The bottom right equation is the same operation, but homogenized. The homogeneous vector $X_w$ is now a 4 x 1 vector, and the matrix $[R~~-R\tilde{C};~~0~~1]$ is a 4 x 4 matrix. This matrix is constructed by concatenating the following together: $R$ (3 x 3 matrix), $-R\tilde{C}$ (3 x 1 vector), a vector of zeros (1 x 3 vector), and the scalar 1.
(I will note that there is a missing tilde over the C in the bottom left equation though.)
How does the [R] matrix work? Is it a tensor? If not, since the dimensions do not match, how can multiplication occur properly?
@arvinwu168 That's exactly right
What is G_{sigma}^{x}? Is it the Derivative of Gaussian (DoG) filter?
@arvinwu168 Not only is it square and symmetric, it is also positive semidefinite; this also means that the eigenvalues of a covariance matrix are always real and non-negative. And yes---here, $I_y I_x$ and $I_x I_y$ are identical (multiplication between scalars is commutative).
Is covariance matrix always symmetric? (looks like order of multiplying Iy and Ix doesn't matter.
If you're interested in learning more about the SVD (a super important concept), I suggest taking a look at this blog. For the purposes of this lecture, all you need to know is that the SVD in this case produces a decomposition involving the eigenvectors and eigenvalues of a matrix.
Here's another example of the Wagon wheel effect. (This one looks a bit weird though, because the airplane propeller looks distorted. Any guesses as to what's going on here?)
Hi all! Head over to the Notebook tab to check out the interactive demos associated with this lecture.
So what is the difference between using a convolution vs. correlation to do image filtering? Well, here's one example.
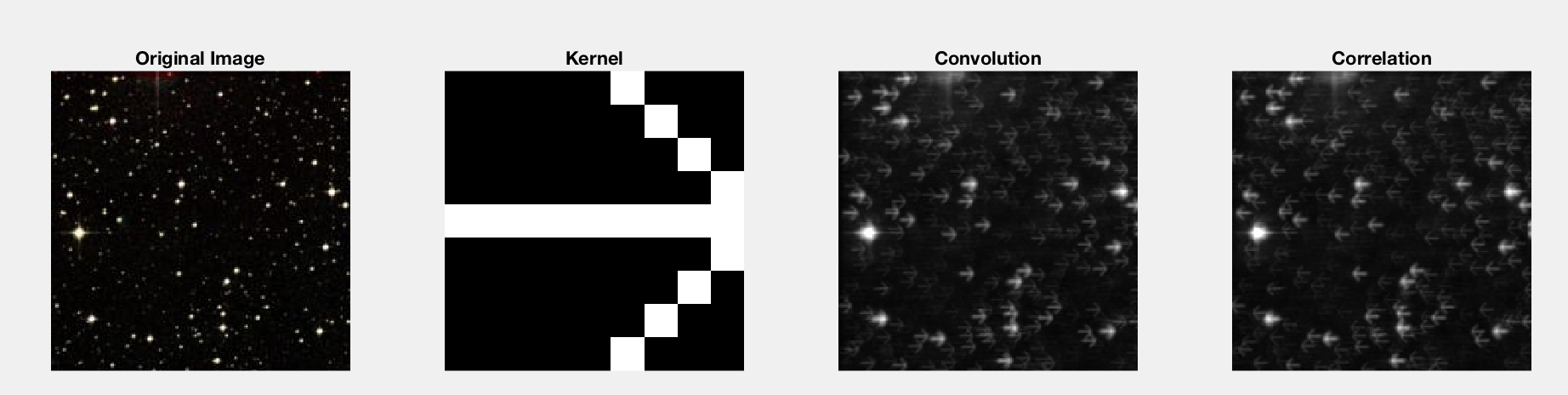
Click here for full resolution image. Note that image is 200 x 200, kernel is 9 x 9.
We have a image of a night sky (a bunch of bright stars) and I'm interested in applying an "arrow" filter for artistic effect. Notice that when I perform a convolution, the arrows are pointing in the same direction as my kernel. When performing a correlation, the arrows are actually pointing in the opposite direction. So the sign used in this case is important, because the kernel is not symmetric.
Did you know? You can submit comments and questions to lecture slides here! You can also use Markdown syntax and LaTeX in comments too.
This link for IntraFace is currently down. I suggest checking out this article instead!