I don't understand why there is a need for a translation (origin) in both K and C - it seems like both are described as "origin transformation"
motoole2
These are two different translation operations:
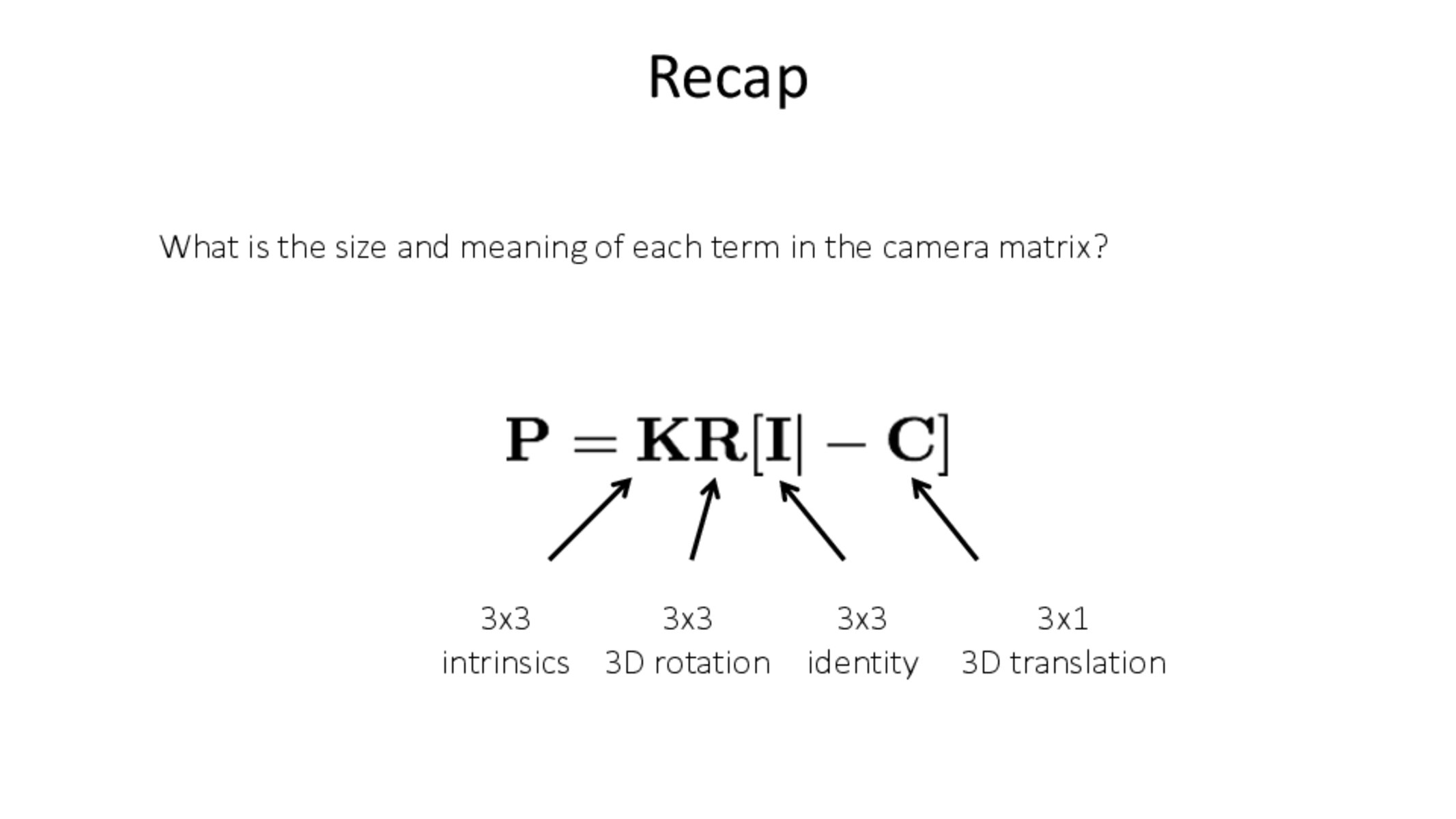
$C$ represents the position of the camera in world coordinates. Note that, when you multiply the matrix with $C$, the result is a homogeneous vector $[0,0,0]$ (which makes sense here, because the projection of the camera center onto its image-plane is undefined). This transformation involves a 3D translation operation, for the world coordinate to camera coordinate transformation.
The intrinsic matrix $K$ also performs a 2D translation operation, for the camera coordinate to image coordinate transform. This translation operation shifts the origin from the center of the image plane to the corner of your sensor (which is generally not in the center of the image plane).
I don't understand why there is a need for a translation (origin) in both K and C - it seems like both are described as "origin transformation"
These are two different translation operations:
$C$ represents the position of the camera in world coordinates. Note that, when you multiply the matrix with $C$, the result is a homogeneous vector $[0,0,0]$ (which makes sense here, because the projection of the camera center onto its image-plane is undefined). This transformation involves a 3D translation operation, for the world coordinate to camera coordinate transformation.
The intrinsic matrix $K$ also performs a 2D translation operation, for the camera coordinate to image coordinate transform. This translation operation shifts the origin from the center of the image plane to the corner of your sensor (which is generally not in the center of the image plane).