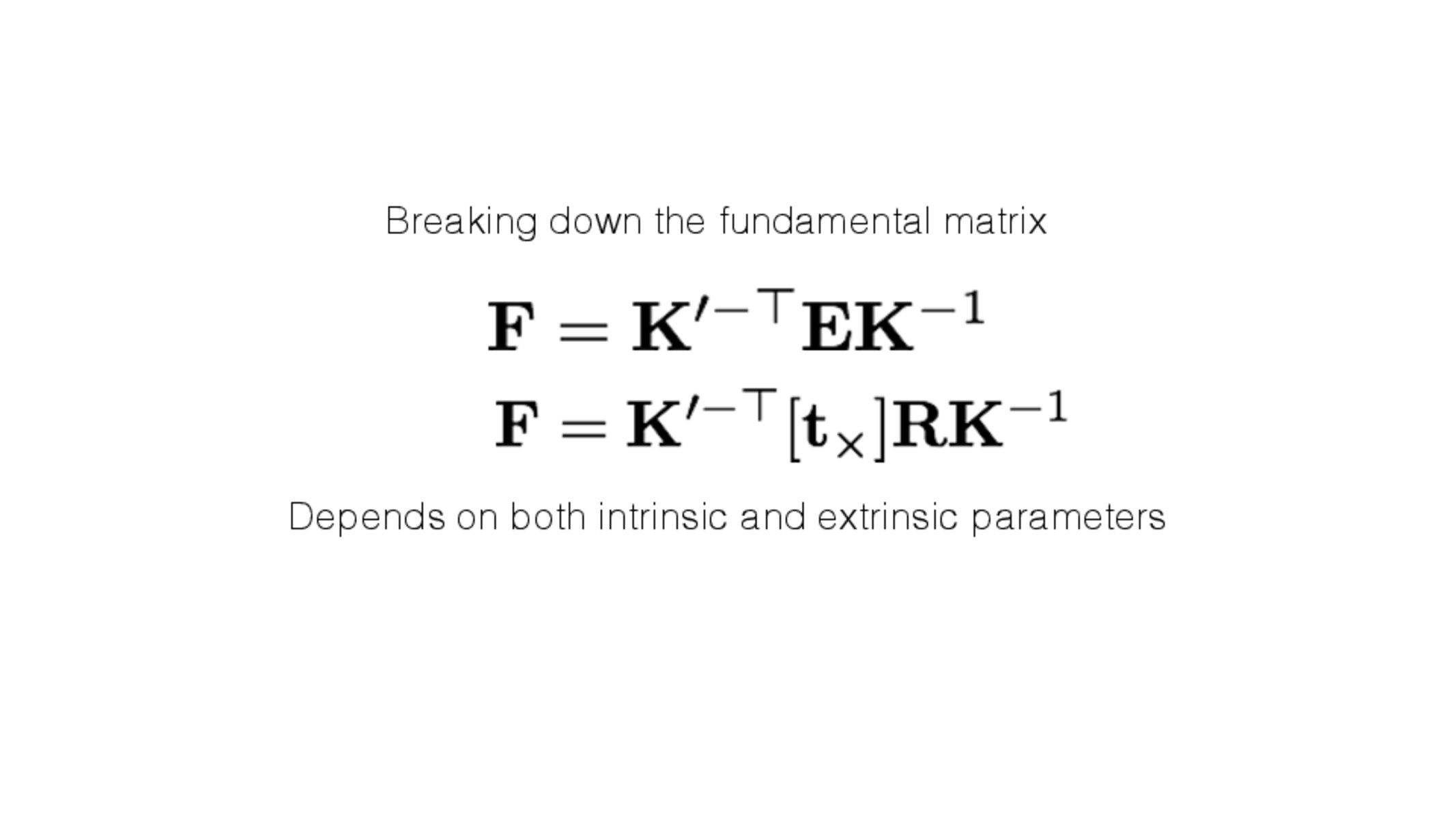
I think a previous slide stated that E = R[t_x], why are we switching the order now to E = [t_x]R? I don't think both of these matrices are symmetric so I'm not sure how this flip is okay.
motoole2
Good observation! We did switch the order, and this works just fine. This is because it is possible to decompose the matrix $E$ in two ways:
$E = [t_{\times}]R = R[t'_{\times}]$
where $t' = R^Tt$.
(Also note that if $x^T E x' = x^T [t_{\times}]R x' = 0$, we can rewrite this constraint as follows: $x'^T E^T x = x'^T R^T[t_{\times}]^T x = -x'^T R^T[t_{\times}] x = 0$.)
nssampat
Sorry, I'm still confused. If we substitute t' = R^T t into E = R[t'], wouldn't we just get E = t since R is unitary and so R*R^T will be the identity matrix?
I'm also still confused about how, even if we could decompose the matrix in two different ways as you stated, we end up with the statement R[t_x] = [t_x]R -- unless the previous slide I was referencing (slide 73 I believe) had an error and should have said R[t'_x]. Basically I'm asking if slide 73 and this slide are referencing the same [t_x] matrix, or if slide 73 was referencing [t'_x].
motoole2
To be fair, I could have been more clear. So let's try deriving this again from scratch!
Let's revisit slide 70. First, we derived the rigid motion equation $x' = R (x-t)$, which can also be rewritten as $x'^T R = (x-t)^T$. Second, because $t$, $x-t$, and $x$ are all coplanar, we also have $(x-t)^T(t\times x) = 0$. Combining these two equations together gives us:
$x'^T (R[t_{\times}]) x = x'^T E x = 0$
where
$E = R[t_{\times}]$
Now note that rotating three co-planar vectors (e.g., $t$, $x-t$, and $x$) produces another three co-planar vectors ($Rt$, $R(x-t)$, and $Rx$). Therefore, we can rewrite our coplanarity equation as follows: $(R(x-t))^T((Rt) \times (Rx)) = 0$. Combining this with the rigid motion equation produces the following:
$(R(x-t))^T((Rt) \times (Rx)) = 0$
$\rightarrow (RR^T x')^T((Rt) \times (Rx)) = 0$
$\rightarrow x'^T[(Rt)_x]Rx = 0$
$\rightarrow x'^T[t_x']Rx = 0$
where
$t' = Rt$ and $E = [t_x']R$
To answer your second question, because $R[t_{\times}] = [t_x']R$ where $t \neq t'$ in general, this slide and slide 73 are using different versions of $t$.
I think a previous slide stated that E = R[t_x], why are we switching the order now to E = [t_x]R? I don't think both of these matrices are symmetric so I'm not sure how this flip is okay.
Good observation! We did switch the order, and this works just fine. This is because it is possible to decompose the matrix $E$ in two ways:
$E = [t_{\times}]R = R[t'_{\times}]$
where $t' = R^Tt$.
(Also note that if $x^T E x' = x^T [t_{\times}]R x' = 0$, we can rewrite this constraint as follows: $x'^T E^T x = x'^T R^T[t_{\times}]^T x = -x'^T R^T[t_{\times}] x = 0$.)
Sorry, I'm still confused. If we substitute t' = R^T t into E = R[t'], wouldn't we just get E = t since R is unitary and so R*R^T will be the identity matrix?
I'm also still confused about how, even if we could decompose the matrix in two different ways as you stated, we end up with the statement R[t_x] = [t_x]R -- unless the previous slide I was referencing (slide 73 I believe) had an error and should have said R[t'_x]. Basically I'm asking if slide 73 and this slide are referencing the same [t_x] matrix, or if slide 73 was referencing [t'_x].
To be fair, I could have been more clear. So let's try deriving this again from scratch!
Let's revisit slide 70. First, we derived the rigid motion equation $x' = R (x-t)$, which can also be rewritten as $x'^T R = (x-t)^T$. Second, because $t$, $x-t$, and $x$ are all coplanar, we also have $(x-t)^T(t\times x) = 0$. Combining these two equations together gives us:
$x'^T (R[t_{\times}]) x = x'^T E x = 0$
where
$E = R[t_{\times}]$
Now note that rotating three co-planar vectors (e.g., $t$, $x-t$, and $x$) produces another three co-planar vectors ($Rt$, $R(x-t)$, and $Rx$). Therefore, we can rewrite our coplanarity equation as follows: $(R(x-t))^T((Rt) \times (Rx)) = 0$. Combining this with the rigid motion equation produces the following:
$(R(x-t))^T((Rt) \times (Rx)) = 0$
$\rightarrow (RR^T x')^T((Rt) \times (Rx)) = 0$
$\rightarrow x'^T[(Rt)_x]Rx = 0$
$\rightarrow x'^T[t_x']Rx = 0$
where
$t' = Rt$ and $E = [t_x']R$
To answer your second question, because $R[t_{\times}] = [t_x']R$ where $t \neq t'$ in general, this slide and slide 73 are using different versions of $t$.